Muestreo y Procesamiento Digital
Perfilado de sección
-
-
La hoja de fórmulas es el único material escrito que se puede llevar a los exámenes.442.2 KB
-
-
El curso está basado fuertemente en el libro:
Procesmiento de señales en tiempo discreto - Oppenheim / Schafer
-
-
Por clase de consultas para el examen de julio de 2020 contactarse con los docentes del curso (Pablo Cancela) por correo o por el foro de novedades https://eva.fing.edu.uy/mod/forum/discuss.php?d=172375.
-
Señales y sistemas en tiempo discreto
Señales: impulso, escalón, exponenciales. Conceptos de frecuencia, periodicidad.
Sistemas: lineal, invariante en el tiempo, causal, sin memoria, estabilidad BIBO.
-
-
-
-
-
Primera clase, introducción al curso de MPD, formalidades. Señales en tiempo discreto.
-
SLIT y Ecuaciones en diferencias
Deducción de fórmula de convolución; respuesta al impulso.
CNS de estabilildad BIBO.
Ecuaciones en diferencias:
- Forma general
- Diagrama de bloques
- Formas directa, forma canónica
- Recursividad
- Solución de ecuaciones en diferencias
-
-
-
Deducción de convolución, propiedades, sistemas en paralelo y cascada.
Estabilidad BIBO. -
Repaso y ejemplos de SLIT.
Ecuaciones en diferencias.
Diagramas de bloques; formas directas, forma canónica.
-
Respuesta frecuencial, Fourier
Respuesta frecuencial de SLIT.
Transformada de Fourier para señales en tiempo discreto.
- propiedades
- convergencia
-
-
-
-
-
-
Fourier theorems under various conventions
There are several slightly different ways to define a Fourier transform. This means that when you look up a theorem about the Fourier transform you have to ask yourself which convention the source is using.
-
-
Qué se considera una respuesta satisfactoria cuando se pide demostrar el T.M.
-
-
-
-
Relación entre ecuación en diferencias, formas directas y respuesta frecuencial.
Definición de muestreo, técnicas de muestreo.
Teorema del muestreo. -
Videos con efectos (y defectos) originados por muestreo temporal y espacial.
-
-
-
Ejemplos de aplicación del teorema del muestreo.
Filtrado anti-solapamiento.
Reconstrucción ideal.
Consideraciones prácticas de filtros anti-alias y de reconstrucción. -
Procesamiento digital de señales en tiempo continuo.
Cambio de frecuencia de muestreo:
- Expansor y compresor
- Decimado: Fs -> Fs/M
- Interpolación (sobremuestreo): Fs -> Fs.L
-
-
Cambio de frecuencia de muestreo por un factor racional L/M.
Transformada Z: definición, región de convergencia, relación con la transformada de Fourier. -
-
Propiedades de la región de convergencia.
Propiedades de la Transformada Z.
Relación entre causalidad, estabilidad y ubicación de los polos.
Ejemplo. -
Ejemplo Octave para mostrar transformada Z
# polo f= @(z) log(abs( 1 ./ (1 - 0.9 ./ z) )) # polo y 2 ceros #f= @(z) log(abs( (1 + 1 ./ z.^2) ./ (1 - 0.9 ./ z) )) # notch y polo #f= @(z) log(abs( (1 - 1 ./z) ./ ((1 - 0.81 ./ z) .* (1 + 0.9 ./ z)))) # funcion para limitar rango de resultados limitar = @(z) max( min ( z, 5 ), -5 ); # tamaño de cuadrícula entre +/- limite limite = 1.5; tx = ty = linspace (-limite, limite, 43)'; [xx, yy] = meshgrid (tx, ty); t = 0:.01:2*pi; # evaluar f en toda la cuadrícula zz = xx + i*yy; tz = f(zz); # borrar figura clf; # F(z) mesh( tx, ty, limitar(tz) ); hold; # F(e^{j\theta}) plot3(cos(t), sin(t), limitar(f(exp(i*t))));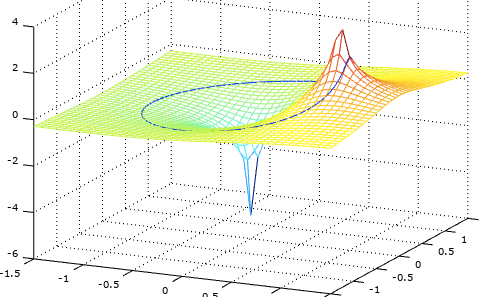
-
-
Repaso transformada Z.
Respuesta frecuencial de ceros y polos; ejemplo con filtro notch.
Retardo de grupo y linealidad de fase. -
-
-
-
Etapas de diseño de filtros.
Diseño de filtros FIR por enventanado:
- tipos de ventana
- procedimiento de diseño
- demostración
-
- Filtros de tiemo continuo: Butterworth, Chebychev, Elíptico, Bessel.
- Demo
- Diseño de IIR por transformación Bilineal
- Diseño de IIR por invarianza de la respuesta al impulso
-
Semana de primeros parciales
1er examen parcial: martes 25/9, 8:00 a 11:30.
Temas para el 1er examen parcial:
Todo lo visto hasta linealidad de fase inclusive. Diseño de filtros se evaluará en el 2do parcial.
-
-
Procesos estocásticos
-
-
-
- Motivación y definición.
- Ejemplos (señal IID, sinusoidal de fase aleatoria, camino aleatorio). Cálculo de media, potencia, varianza.
- Estacionareidad.
- Autocorrelación y autocovarianza.
-
-
-
Autocorrelación y autocovarianza:
- Propiedades.
- Interpretación.
- Ejemplo de filtrado de proceso IID.
Densidad espectral de potencia:
- Definición.
- Filtrado de procesos (Gy = |H|^2 Gx)
-
Densidad espectral de potencia:
- Ejemplo de filtrado de proceso.
- Cálculo de potencia luego de filtrar.
- La densidad es efectivamente una densidad (duh!).
- Interpretación de Gx.
Muestreo de procesos:
- Rx[n] son muestras de Rxc(t).
- Relación entre Gx y Gxc.
Ruido blanco:
- Ruido térmico y otras fuentes de ruido de banda muy ancha.
- Blanco en T.D. = IID con media nula.
Relación señal a ruido.
-
-
Ergodicidad:
- Definición
- Ejemplos
Cuantización:
- Estudio de error de cuantización.
- Modelo del error.
- Ejemplo de sobremuestreo + dithering para reducir error de cuantización.
-
-
-
Nota: El audio de la primera hora de clase está tomado de la cámara por problema técnico con micrófono solapero.
Reducción de ruido, ejemplo de técnicas:
- Minimización de SNR.
- Minimización de error entre salida y entrada.
Nota2: El ejemplo, que usa como filtro
[alfa, 1, alfa]no es muy feliz porque la optimización resulta enalfa=0. Un filtro[alfa, beta, alfa]o[alfa, 1-2alfa, alfa]hubiera sido más razonable y resultado en una optimización razonable.Estructuras de filtros:
- Formas directas.
- Formas traspuestas.
- Filtros transversales (FIR).
- Configuración en cascada.
- Configuración en paralelo.
Errores de operaciones en filtros:
- Error de redondeo en operaciones (clase próxima).
- Error de aproximación de coeficientes.
- Saturación (cálculo de cotas en todos los puntos del filtro; escalado previo para evitar saturación).
- Ciclos límite.
-
-
Representación numérica:
- punto fijo
- punto flotante
- fuente de error en suma y producto
Modelado:
- error absoluto en productos no enteros en punto fijo
- error relativo en sumas y productos en punto flotante
-
Serie discreta de Fourier:
- Fórmulas de síntesis y análisis.
- Relación con la transformada de Fourier.
- Propiedades.
- Transformada discreta.
- Algoritmos rápidos (FFT)
Aplicaciones:
- Análisis de espectro
- Codificación de imágenes y video (transformada de coseno)
- Modulación OFDM
-
Semana de segundos parciales
Del 24/11 al 5/12.
Período de exámenes diciembre
Del 6/12 al 23/12.