Hola Leandro, respondo a continuación a tus preguntas:
1) En el ejemplo de la diapositiva 18 se muestra como el ruido de medida de alta frecuencia afecta el desempeño del sistema de control cuando no se incluye un filtro antialiasing. En el ejemplo se considera la situación simplificada en la que el ruido de medida es simplemente una señal siunosidal de frecuencia angular Wr = 316 rad/s. Cuando esta señal se muestrea (con período de muestreo Ts = 0.2 s, es decir Ws = 31.416 rad/s aproximadamente), debido al aliasing, aparecen infinitas nuevas componentes de frecuencia de la forma (+/-)Wr + n Ws, con n entero. Casi todas estas nuevas frecuencias no se manifiestan en la salida porque quedan suficientemente por fuera del ancho de banda del sistema realimentado, pero los alias (+/-)Wr (-/+) 10 Ws = 1.84 rad/s dan lugar a la sinusoide que se aprecia claramente en la salida deteriorando la respuesta a escalón (en la diapositiva se mide "experimentalmente" la frecuencia de esta oscilación y se indica que es igual a 1.85 rad/s, muy cercana a la frecuencia teórica esperable por el aliasing).
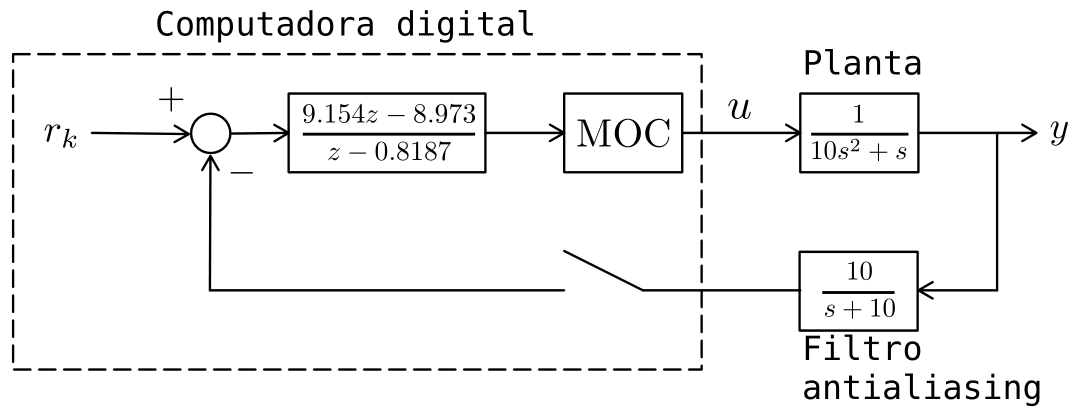
La función de un filtro antialiasing es atenuar suficientemente todas las componentes de frecuencia mayores o iguales a la frecuencia de Nyquist (Ws/2), de forma tal que al muestrear la señal filtrada, el aliasing sea poco significativo. Por esto, el filtro antialiasig (que necesariamente debe ser analógico) se coloca justo antes del muestreo. En la práctica se suele elegir la frecuencia de corte del filtro suficientemente por debajo de la frecuencia de Nyquist para lograr la atenuación deseada a la frecuencia de Nyquist. A su vez esta frecuencia de corte debe ser suficientemente mayor al ancho de banda del sistema realimentado ya diseñado, si no se pretende afectar el diseño con la incorporación del filtro. En casos en los que interesa que la frecuencia de muestreo sea lo menor posible, se permite que la frecuencia de corte del filtro quede próxima al ancho de banda pretendido para el lazo cerrado; pero esto implica considerar al filtro antialiasing desde el principio del diseño para que el controlador de tiempo discreto pueda compensar el atraso de fase y la atenuación del filtro antialiasing.
2a) Con respecto a esta duda, tenés toda la razón y debo reconocer que cometí un serio error al presentar las diapositivas 22 a 27 de la clase 12 como "emulación en el dominio de la frecuencia". No se trata de una emulación porque se trabaja con la transmitancia muestreada de la planta. Tampoco se trata de un diseño directo en el dominio de la frecuencia porque se hace uso de la transformación bilineal y la frecuencia ficticia nu (en vez de omega) para facilitar el trazado de los diagramas de Bode. Lo que se emula es la técnica de diseño de tiempo continuo, pero no un diseño en frecuencia de tiempo continuo. Este tema no está cubierto en el libro de FPW y lo inlcuí en la clase 12 porque involucra la transformación bilineal que presentamos al ver métodos de emulación, pero esta técnica de diseño en frecuencia no es un método de emulación; es simplemente una técnica de diseño en frecuencia parecida al diseño directo en frecuencia en tiempo discreto (que vimos en la clase 15) excepto porque se hace uso de la transformación bilineal para simplificar el trazado de los diagramas de Bode sobre el intervalo (0, inf) en vez de (0, pi). ¡Gracias por observar este grave error de presentación del tema! Voy a corregir las diapositivas en cuanto pueda.
2b) La ventaja es que como justamente no es un método de emulación, se diseña la respuesta en frecuencia del sistema de tiempo discreto de una manera mucho más fidedigna que si se diseñara en frecuencia en tiempo continuo y después se emulara con alguno de los métodos vistos. Esto permite elegir frecuencias de muestreo más bajas que las que se necesitarían para un diseño por emulación satisfactorio, es decir la relación frecuencia de muestreo / ancho de banda deseado no tiene que ser tan alta. El uso de la transformación bilineal en este caso no es para emular un diseño, sino simplemente para poder seguir trabajando con los diagramas de Bode a los que estamos acostumbrados (al costo de la distorsión de la escala de frecuencia que hay que tener en cuenta durante el diseño).
Saludos,
Alejandro
 . Resumiendo:
. Resumiendo: