Buenas, pude llegar al resultado correcto, pero para ello tuve que hacer una suposición que no se como justificarla.
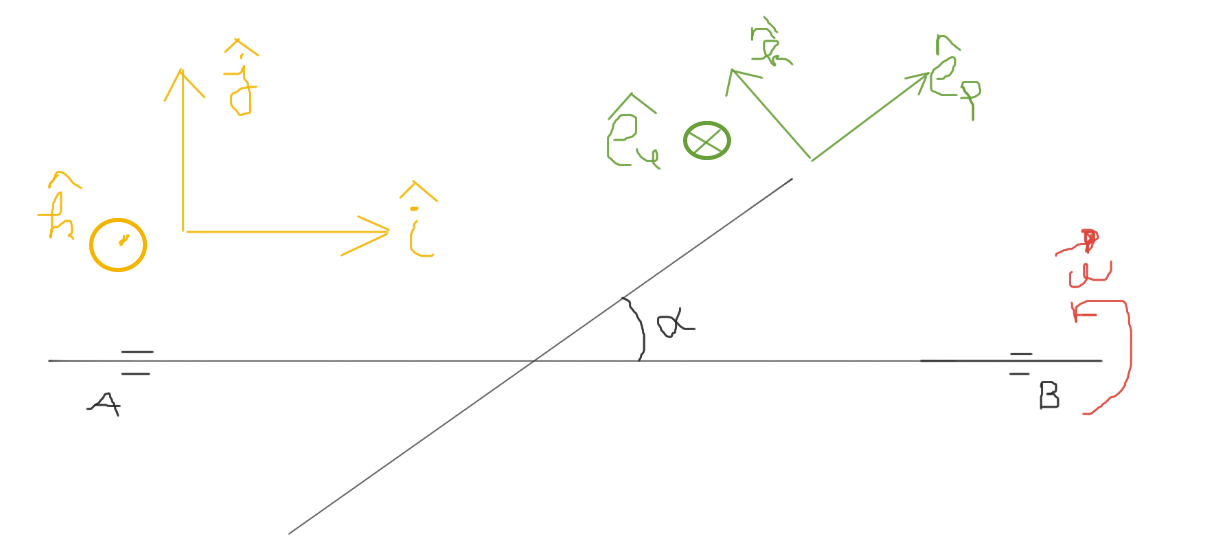
Lo que hice fue descomponer w, que estaba según el eje i, en dos versores que acompañaran a la barra, como se muestra en la figura. Cuando descompuse w ahí, utilice que solo se encontraba en dos versores, (k' y e_ro), creo que esto está bien para el instante inicial, pero no me queda claro si estaría bien para todo tiempo, pues e_ro rota, y e_phi también, entonces en un cierto t*, el lugar que ocupaba e_ro al principio, será ocupado por e_phi, haciendo que para ese instante t*, la descomposición de w sea otra. Mi duda es, cómo hago la descomposición de w para todo tiempo, o esto no es necesario? Si no fuera necesario, por qué no lo es?
Gracias, saludos!