Yo llegue a esta parte pero no se como hallar el tercer vector 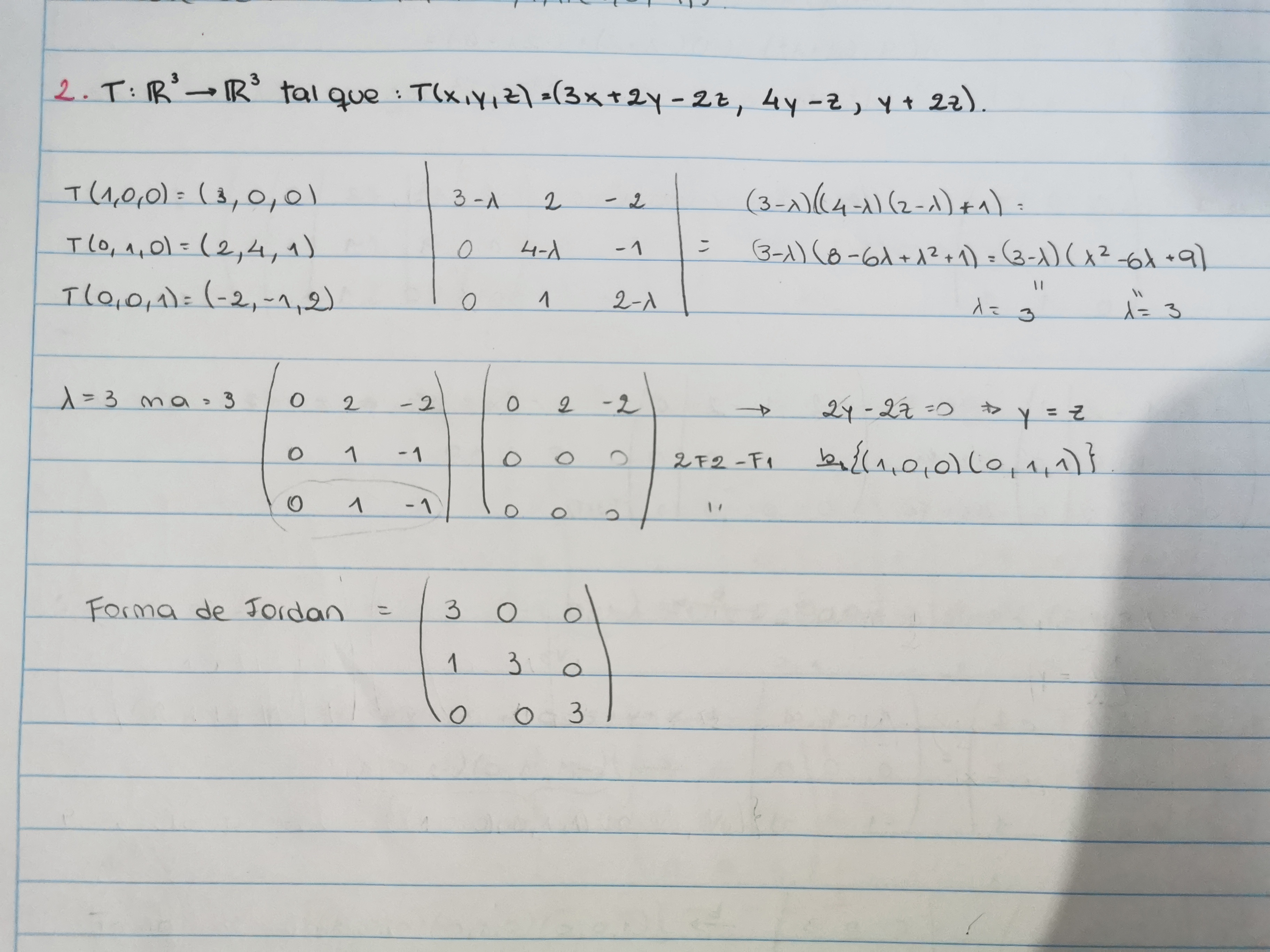
Hola Melany.
Antes que nada te quería comentar que los sub-bloques de Jordan se ponen en orden creciente por tamaño. O sea, primero el de 1x1 y después el de 2x2.
Así que la forma de Jordan es ")
Ahora para hallar la base de Jordan B= {<strong>u, v, w</strong>}
Fijate que si la matriz asociada a T en la base B es J entonces
T(u) = 3u
T(v) = 3v +w => (T-3I) (v) = w
T(w) = 3w
Entonces u y w son vectores propios y v es tal que (T-3I) (v) = w.
Una forma de hacerlo es teniendo u y w después hallar v resolviendo el sistema
(T-3I) (v) = wEl tema es que si llamamos v=(x,y,z), no para cualquier w vector propio, el sistema (T-3I) (x,y, z) = w tiene solución.
Fijate que justamente
 \left( \begin{matrix} x\\y\\z \end{matrix} \right)= \left( \begin{matrix} 1 \\ 0 \\ 0 \end{matrix} \right) \quad \text{ y } \left( \begin{matrix} 0 & 2 & -2 \\
0&1&-1\\
0&1&-1 \end{matrix} \right) \left( \begin{matrix} x\\y\\z \end{matrix} \right)= \left( \begin{matrix} 0 \\ 1 \\ 1 \end{matrix} \right)") son sistemas incompatibles.
son sistemas incompatibles.
Entonces tendrías que elegir w un vector propio, o sea w=(a, b, b), de forma tal que el sitema
 \left( \begin{matrix} x\\y\\z \end{matrix} \right)= \left( \begin{matrix} a\\ b \\ b \end{matrix} \right)")
te quede compatible (¿recordás cómo hacías esto en Gal1? Escalerizás y si en la izquierda tenés una fila de ceros, la entrada en la derecha tiene que ser cero; y de ahí sacás la condicón que tiene que cumplir w para que el sistema sea compatible. Lo podés hacer a ojo también je)
Para ese w, cualquier solución del sistema te sirve como v, y después tenés que tomar u otro vector propio que sea L.I. con w.
Otra forma de hacerlo es hallando primero v.
Fijate que (T-3I)2(v)= (T-3I)(w)=0 (porque w es vep)
Entonces v está en el Ker( (T-3I)2) pero no está en el Ker( (T-3I)) (porque (T-3I) (v) = w≠0)
Entonces v no está en S3={(x, y, y) } y está en el ker((T-3I)2)
Fijate que si hacés la matriz de T-3I al cuadrado, te da la matriz nula. Entonces ker((T-3I)2)=R3
Entoces v es cualquier vector de R3 que no esté en S3 (por ejemplo v= (0,0,1)).
Y después haces w= (T-3I) (v)
y te falta u que es otro vector propio que sea L.I. con w.
Avisame si se entendió
Saludos!
Marianita
Hola, que tal?. Yo estoy con el mismo problema en este ejercicio, no entiendo bien la explicación para la solución de que el sistema queda incompatible.
Muchas gracias.
Muchas gracias.