Buenas, haciendo este ejercicio me surgió una duda, intente resolverlo por un camino distinto al de la resolucion y llegue a un resultado muy similar pero a diferencia de un termino que al fijarme de donde provenia me llamo la atencion.
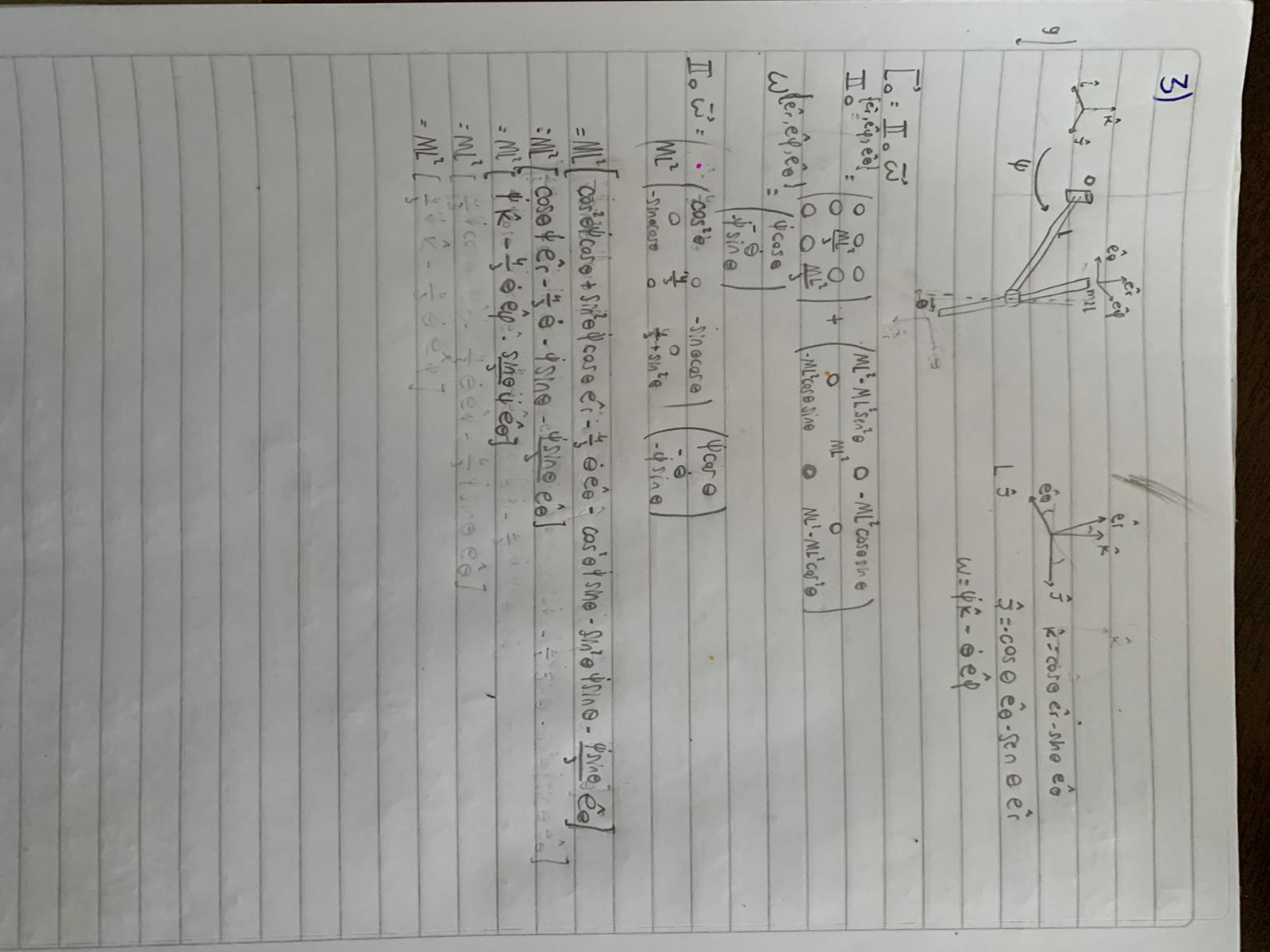
Mi intencion fue plantear el tensor de inercia desde el punto O y luego multiplicarlo por la velocidad angular para hallar el momento angular desde este punto; primero calcule el tensor de inercia desde G en una base solidaria a la barra de largo 2l (e_r, e_psi,e_tita) y luego utilice stainer. Despues de esto descompuse la velocidad angular en tal base y la multiplique, pero ahi es donde encontre el problema, la barra 2l tiene una velocidad angular segun e_psi que creo no llegue a descomponer del todo bien, esta vel angular esta puramente contenida en e_psi, pero el eje de pasa por G, no por O y esa es la diferencia creo de mi resultado, me sobra un ML2 de cuando aplique stainer segun e_psi.
No se si me logro explicar bien pero adjunto foto de mi resolucion y probablemente sea mas facil de interpretar.
Desde ya gracias.