Tengo una duda con el teorema de coriolis, en particular cuando hay varias velocidades angulares en un mismo plano.
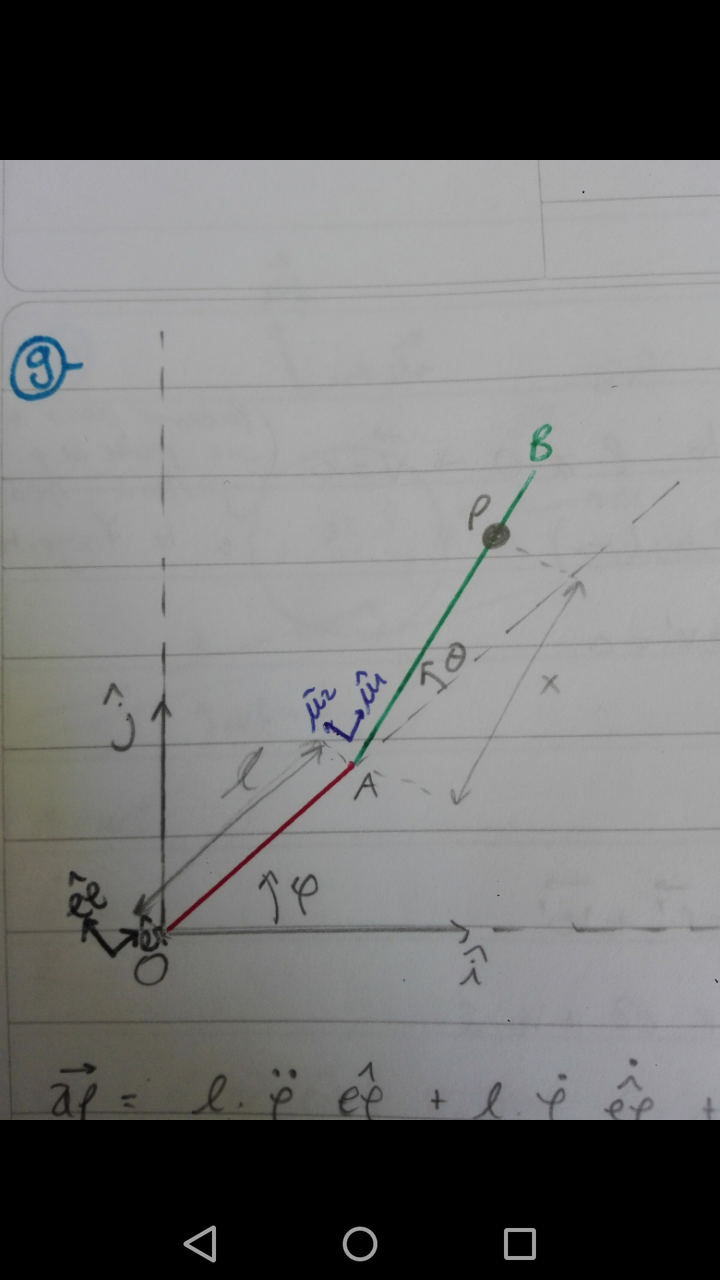
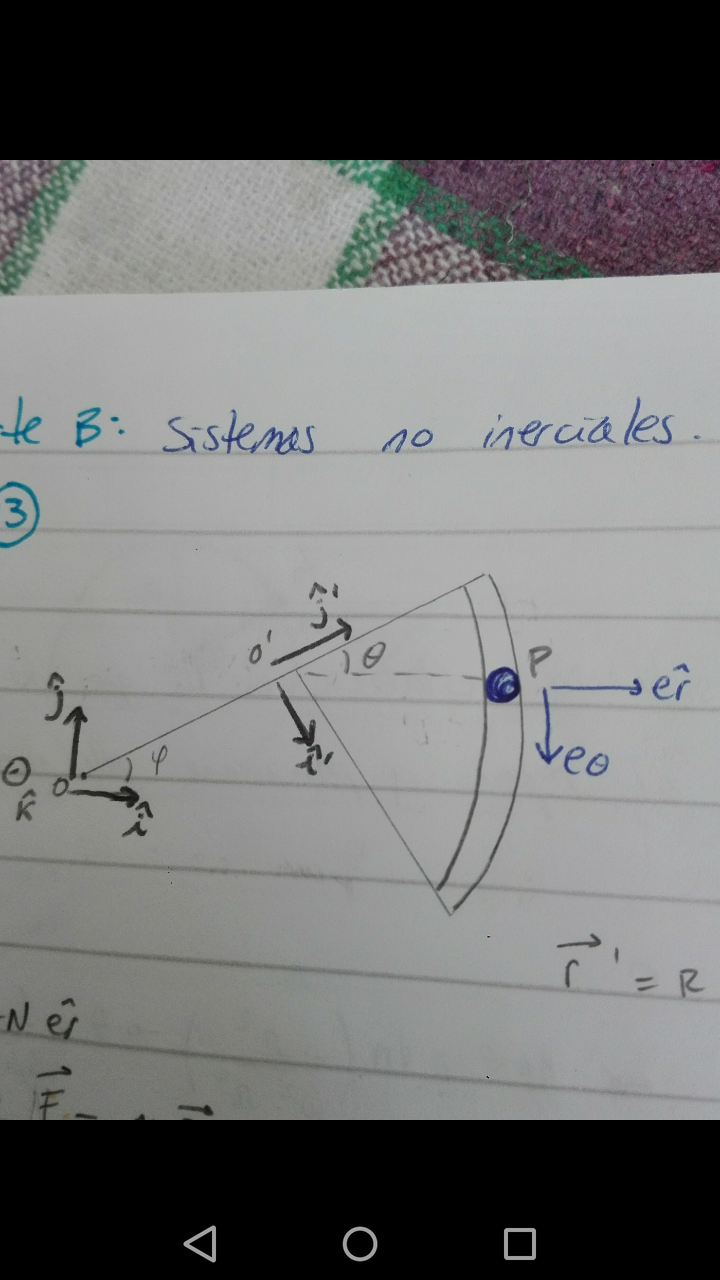
En la formula se supone que W representa un cambio de orientacion de los ejes de S' respecto a S. El problema es que en ejercicios he tomado ese cambio haciendo adicion de velocidades angulares (por ejemplo en el ejercicio 9 y 10 del pr1) pero en otros me queda la duda si se esta tomando en cuenta (por ejemplo en el ejercicio 13 del pr2 que está resuelto en video). Si en este ultimo ejercicio no se pidiera la condicion de la parte A, debería tomar esa velocidad angular también?
Cuando no están en el mismo plano no importaría verdad?
Gracias.





\hat{k}")


")

\hat{k}")



=\dot{\varphi}(t)")






\hat{k}")



\hat{k}")



 \vec{k}")




