Hola profe, este práctico está algo complicado así que tengo algunas dudas
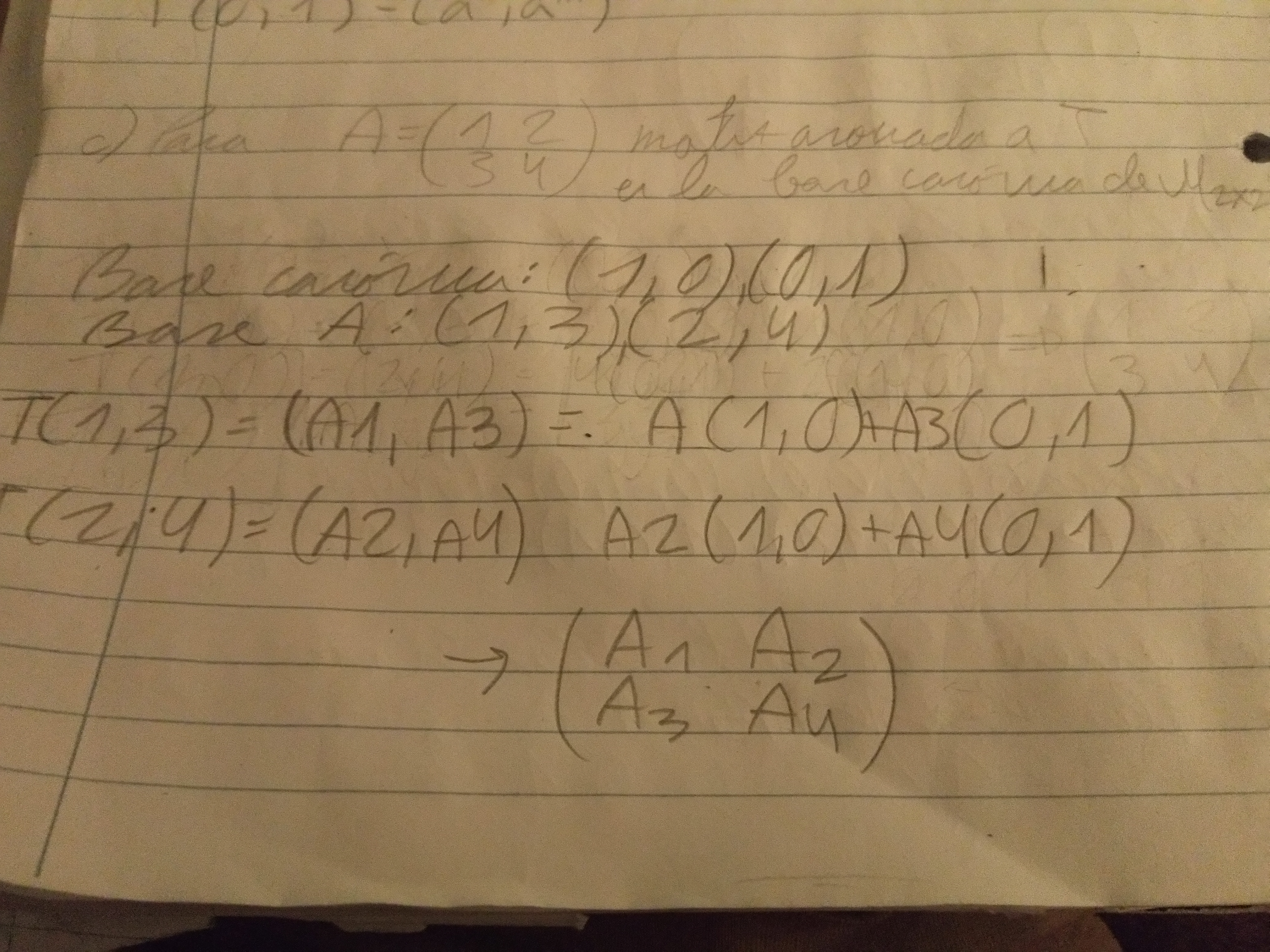
En la 1.1.c., me pasa que entiendo el procedimiento para la solución pero no entiendo la letra de ese ejercicio, o sea, capto de forma general lo que quiere decir pero no sé si tal vez se me podría explicar un poco lo que plantea?
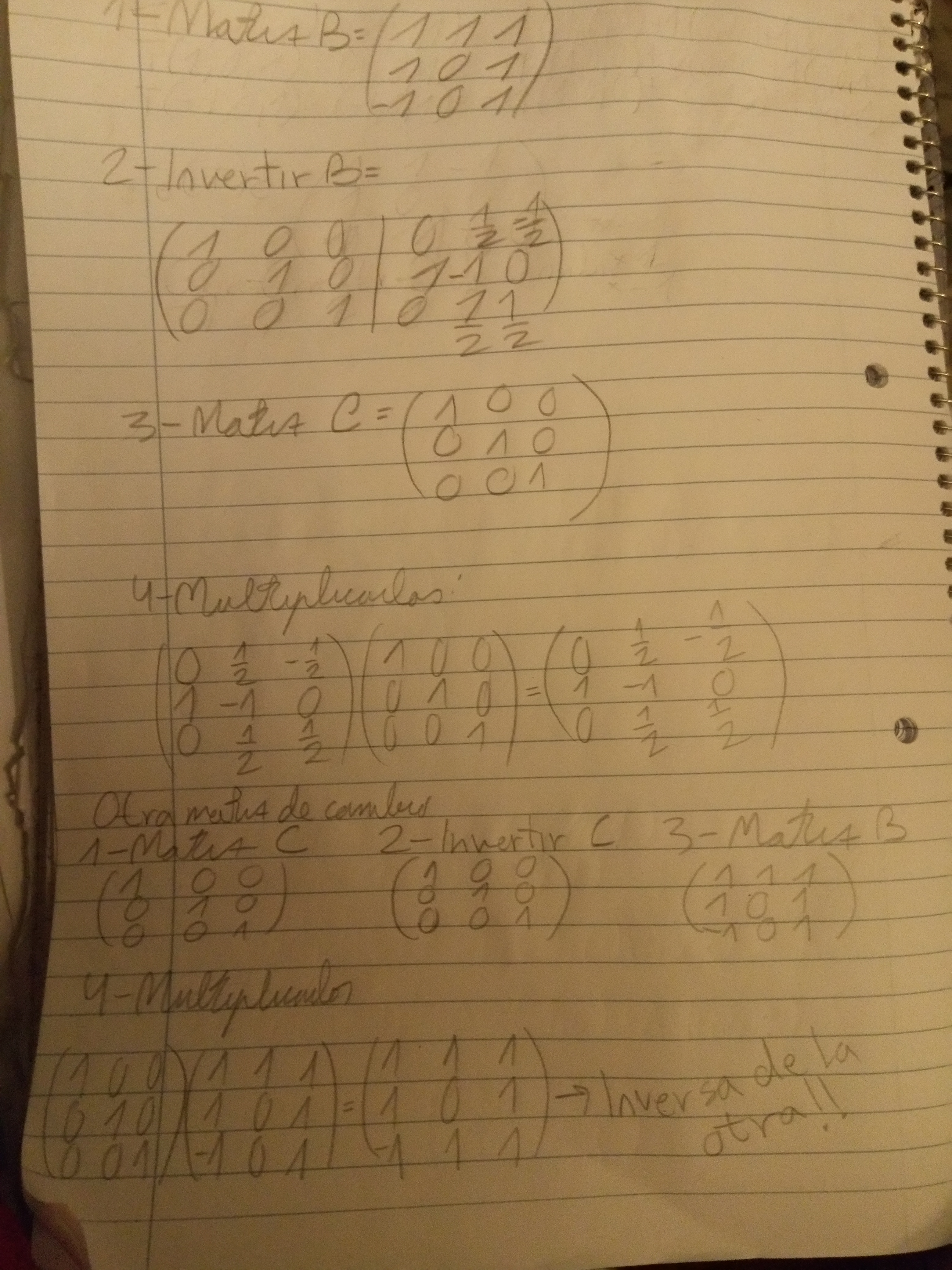
La parte 2 me costó un montón pero después de ver cómo se hacen sólo tengo duda de las últimas dos, la parte de), yo había intentado separar en casos e intentar hacer dos matrices del estilo a,b,c,d, una que cumpliera con ser invertible y otra que no, pero no me salió, y vi la respuesta y no capto lo que hizo el profe, él tomó dos matrices, una de vectores (1,0)(1,0) y otra de vectores (0,0)(0,1) y luego aplicó que típicamente se hace de ver qué pasa en la suma y eso, pero no capto bien qué hizo y por qué, pongo foto por si no se entendió
En la e) me pasa que tampoco entendí la forma de solucionarlo, yo había intentado hacer algo como Te(kv+u) y así pero fue mala idea, pero la solución no la capto mucho
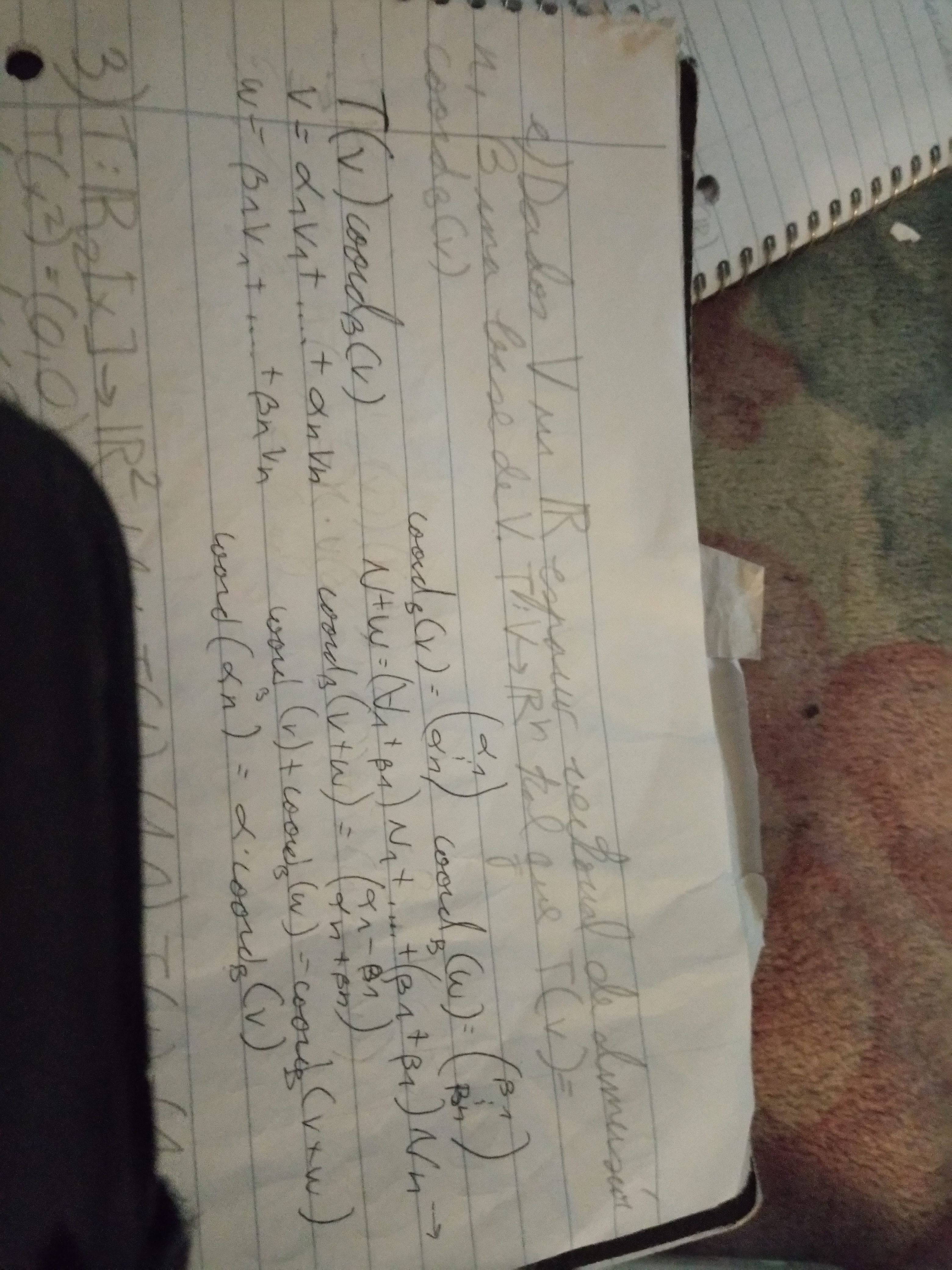
No sé bien para qué tomo un w, y todo lo demás ya se me hace algo confuso
En la 3, T está bien definida, porque tiene preimágenes propias de R² no? Yo lo vi así, como que es por eso, o sea si Te fuera tipo Y=(1,2,3,4) ahí ya no estaría bien definido en R², luego para hallar T(p), lo correcto es, como piden algo general, escribir ax²,bx,c, ese sería p, y como piden para todo p, refiere a que consiga todos los a ,b y c que se pueden hallar usando bases de T, así que como ahi tengo esos 3 vectores, hago a(1,0)+b(1,1)+c(0,0), que me va a dar, (a+b, b) ,es este el razonamiento correcto? O al menos el que aplicar para cuando me pidan hallar algo parecido
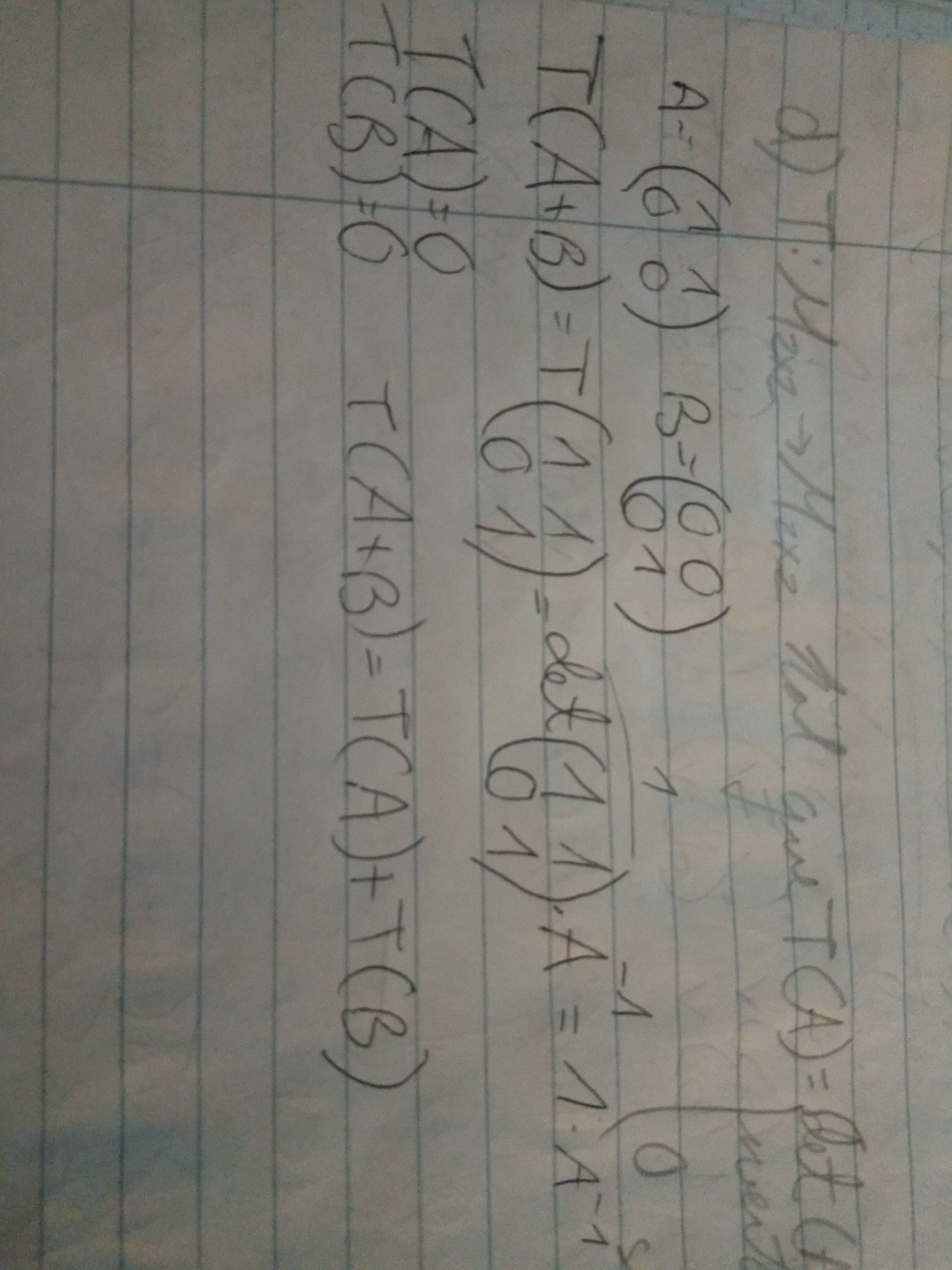
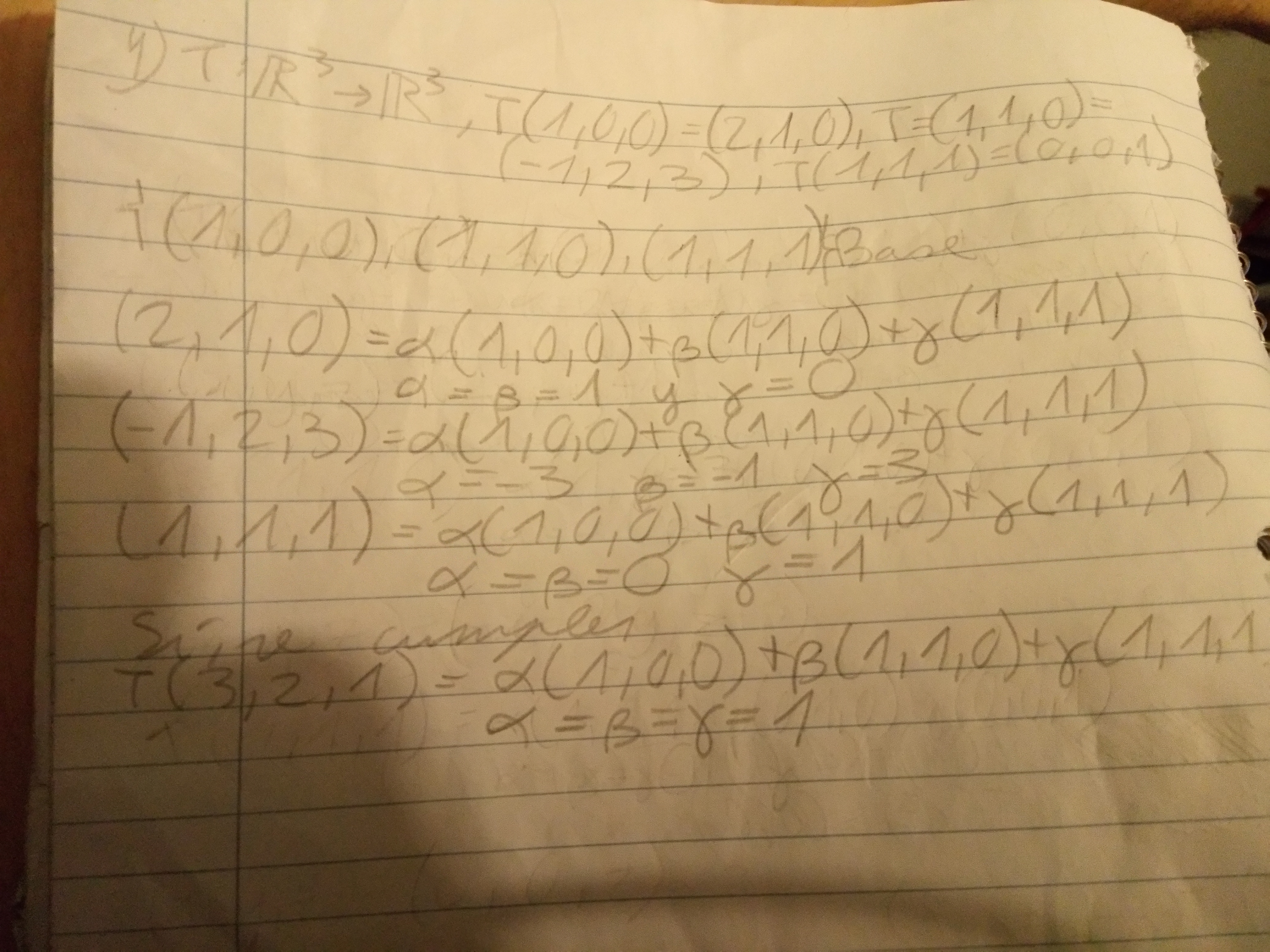
En la 4, a), no sé 100% si lo que hice es del todo correcto
Luego en la 5) hallar la forma general pero para matrices se me hizo algo complejo, pero noto que es algo simple, sólo que se me da mal, hice esto:
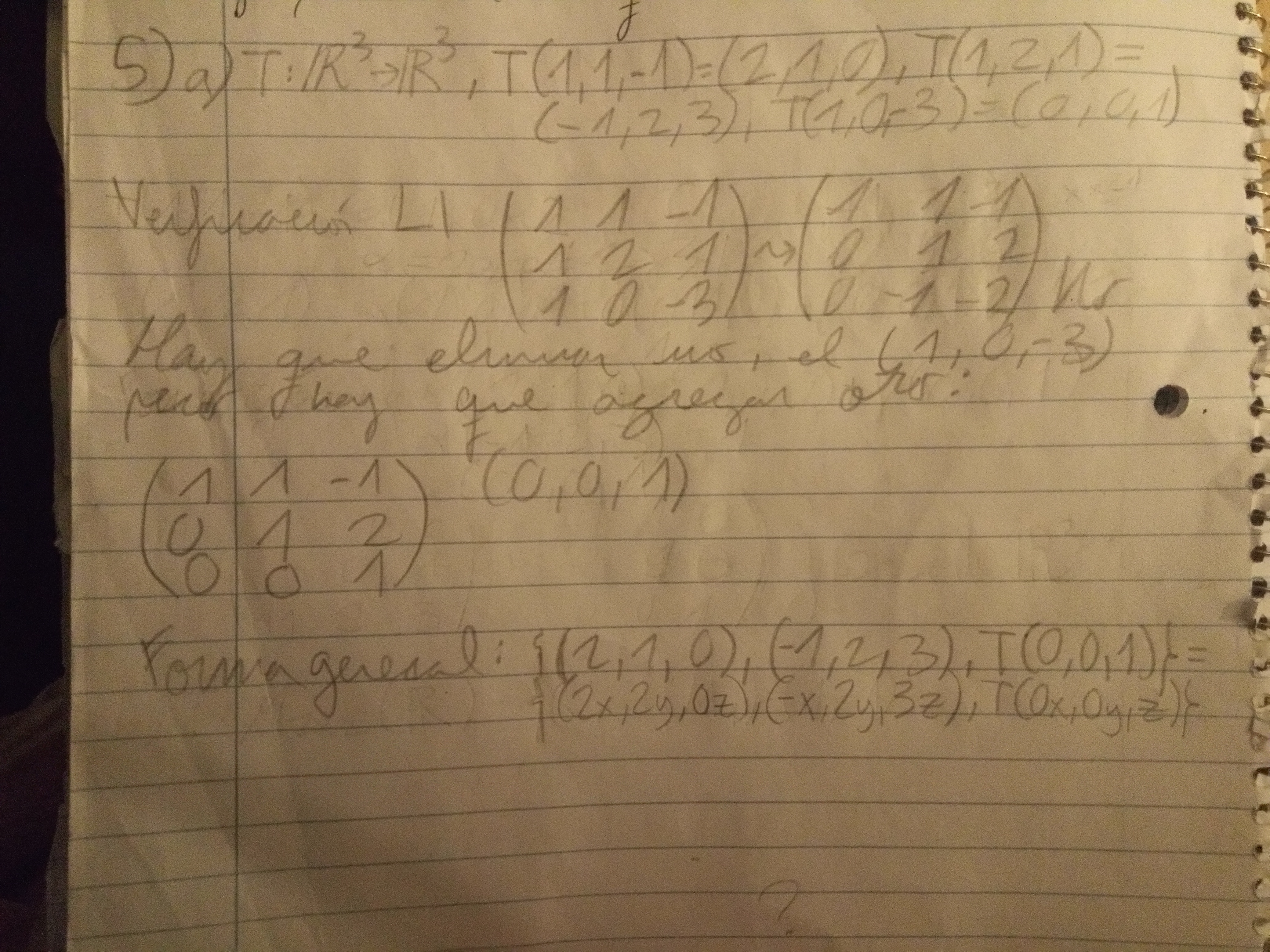
En este ejercicio 5) tengo algunas dudas, por ejemplo, el profe se "salteó" la verificación de LI, y le pregunté a alguien y me dijo que no hace falta, pero esto de acá ni siquiera es LI, hay que meterle otro vector para que siga de R³, eso no influye en el ejercicio? Yo le puse el vector (0,0,1), y la forma general, no sé del todo si se anota así en vector, de todas formas probablemente esté mal
En la 5b sin embargo sí fue necesario hacer la verificación, hasta el profe la hizo, e incluso eliminamos vectores para que además quedara algo propio de R², ese ejercicio creo que me quedó claro
En la parte 2, la parte a me quedó así, no se si la correcta, porque son números algo feos
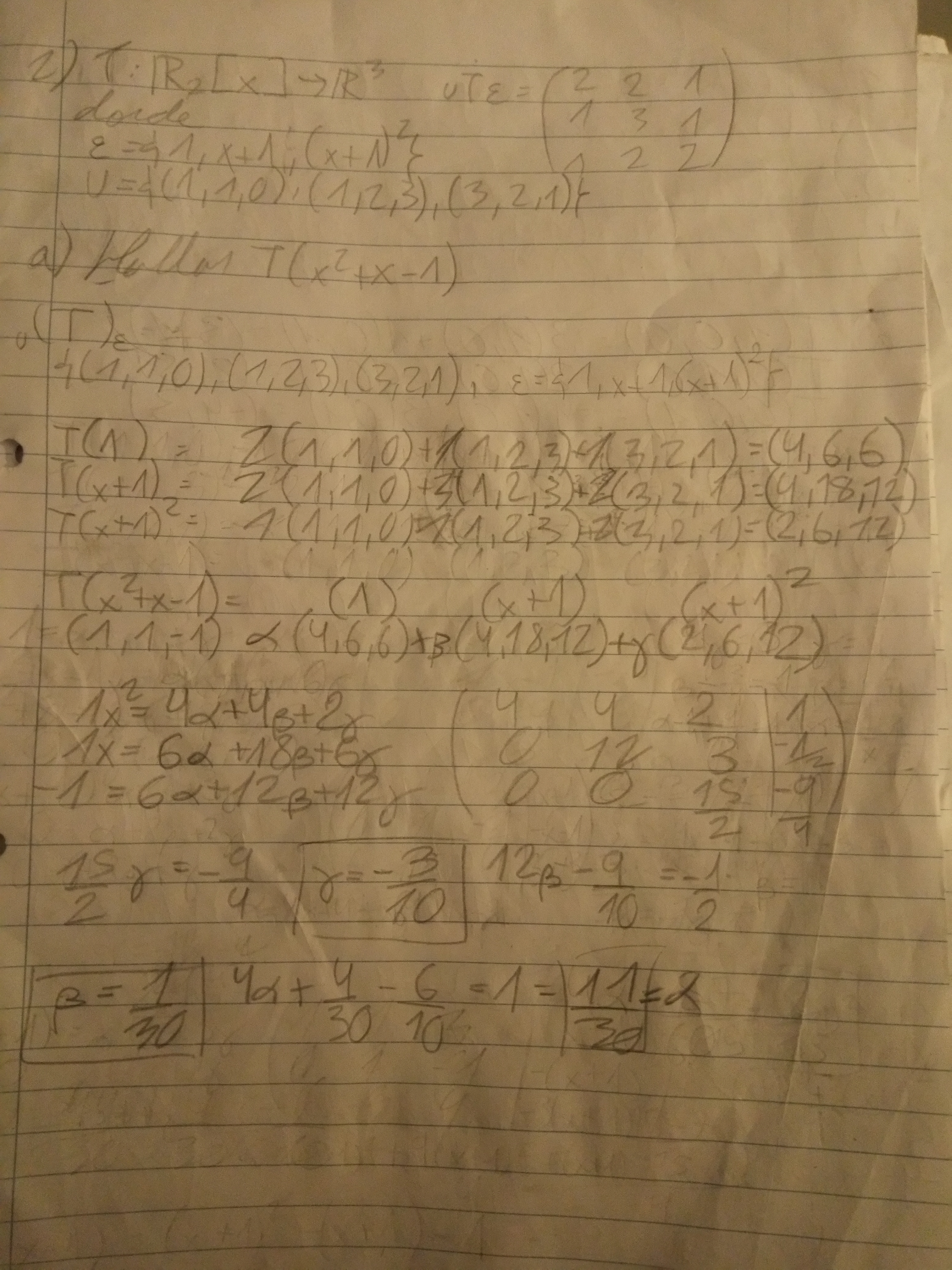
Y en la parte b), no sería como buscar (x²+x-1) pero con +1 en vez de -1? Se me ocurre el mismo procedimiento pero cambiando ese signo, pero no sé si cuenta como expresión general
Finalmente, quería ver si esta demostración estaba bien, porque es de lo que más me cuesta
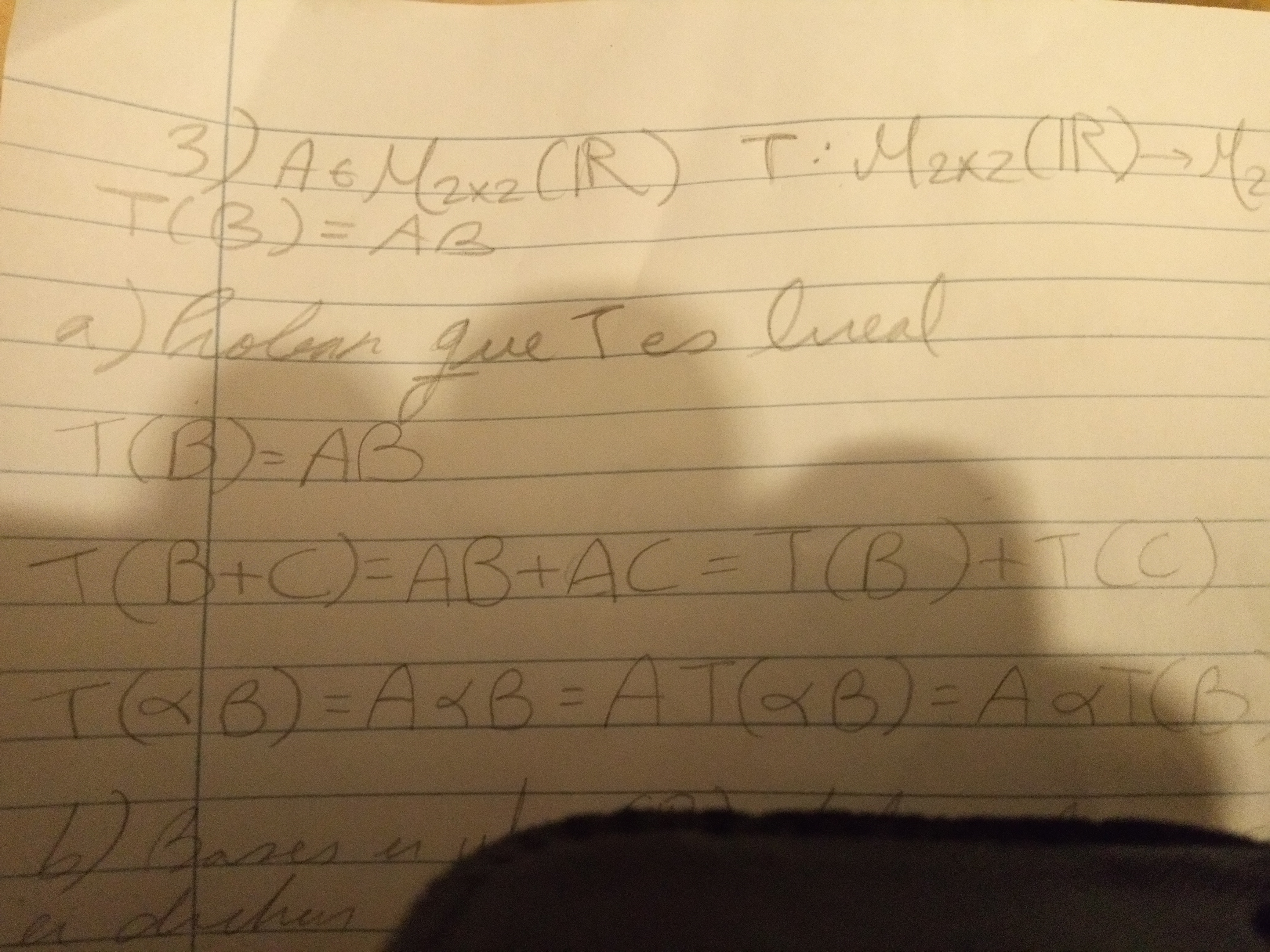
En la parte de la suma, pensé que como T(B) lleva a AB, entonces T(C) debería llevar a AC, y el resto lo normal
Todavía me falta practicar más las matrices asociadas ,así que por ahora no tengo preguntas de ello, pero gracias por contestar !!