Estimados:
Subí las diapositivas que usé hoy (con algunas modificaciones y agregados) y el pasado jueves en el práctico.
Alejandro
Estimados:
Subí las diapositivas que usé hoy (con algunas modificaciones y agregados) y el pasado jueves en el práctico.
Alejandro
 y luego suponiendo que no habían otras fuerzas sobre el eje plantee que
y luego suponiendo que no habían otras fuerzas sobre el eje plantee que  . Sien embargo en la resolución del ejercicio se planteo la relación
. Sien embargo en la resolución del ejercicio se planteo la relación  constantes que no se daban en la letra pero se asumieron en la resolución, además se planteo que
constantes que no se daban en la letra pero se asumieron en la resolución, además se planteo que  . No encuentro donde puede estar mi error, le agradezco me despeje dudas, gracias
. No encuentro donde puede estar mi error, le agradezco me despeje dudas, gracias 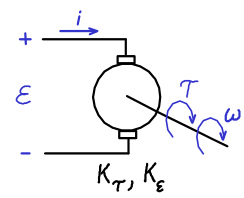
 , es proporcional a la corriente de armadura,
, es proporcional a la corriente de armadura,  , es decir
, es decir  , donde
, donde  es una constante positiva.
es una constante positiva.  , es proporcional a la velocidad angular del eje,
, es proporcional a la velocidad angular del eje,  , es decir
, es decir  , donde
, donde  es una constante positiva.
es una constante positiva. , y el torque de rozamiento viscoso,
, y el torque de rozamiento viscoso,  , porque el eje no necesariamente rota a velocidad constante. La suma de torques sobre el eje es, por la segunda Ley de Newton para rotación, igual momento de inercia complexivo del eje con respecto al eje de giro,
, porque el eje no necesariamente rota a velocidad constante. La suma de torques sobre el eje es, por la segunda Ley de Newton para rotación, igual momento de inercia complexivo del eje con respecto al eje de giro,  , por la aceleración angular del eje, es decir:
, por la aceleración angular del eje, es decir:  (suponiendo que el torque que ejerce la carga sobre el eje, , se define positivo en sentido contrario al sentido positivo elegido para ).
(suponiendo que el torque que ejerce la carga sobre el eje, , se define positivo en sentido contrario al sentido positivo elegido para ). , ya que la potencia eléctrica entregada al motor es igual a la potencia mecánica que el motor entrega al eje. En este caso, se tiene necesariamente que
, ya que la potencia eléctrica entregada al motor es igual a la potencia mecánica que el motor entrega al eje. En este caso, se tiene necesariamente que  y el motor se caracteriza mediante una única constante
y el motor se caracteriza mediante una única constante  . En el ejercicio, se consideró el caso más general en el que el motor no necesariamente es ideal y por eso se asumió que se conocen y (no necesariamente iguales).
. En el ejercicio, se consideró el caso más general en el que el motor no necesariamente es ideal y por eso se asumió que se conocen y (no necesariamente iguales).